
Yewon Lee
About Me
I am a Ph.D. student in Computer and Information Science (CIS) at the GRASP Laboratory at the University of Pennsylvania, where I am advised by Prof. Rachel Holladay. My research interest centers around decision making, planning, and control for robot manipulation, particularly in contact-rich, long horizon settings.
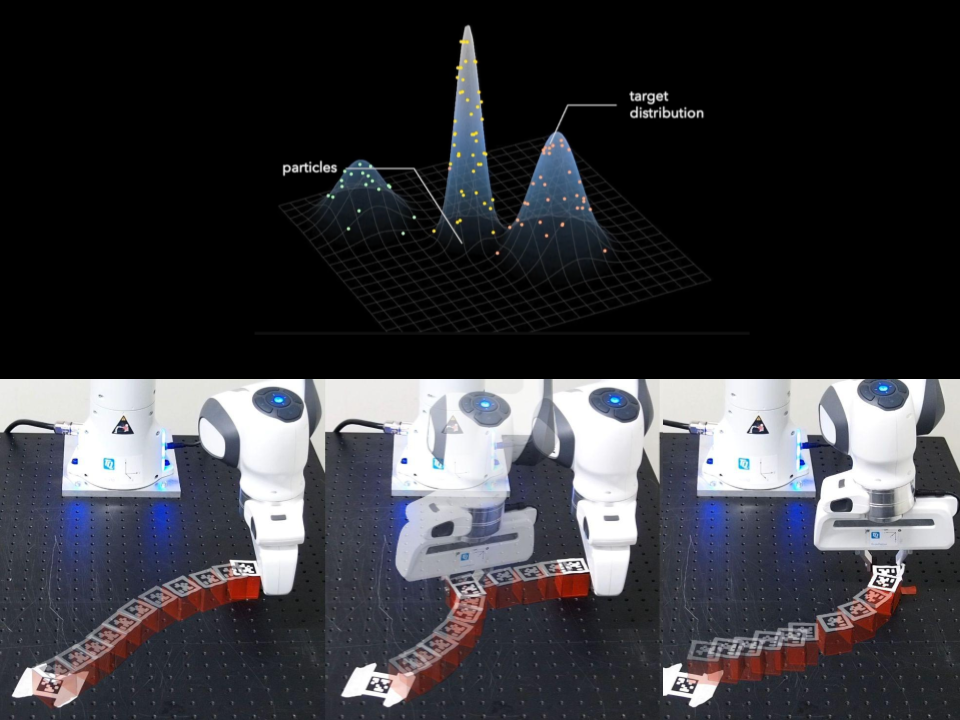
I obtained my Master’s in Computer Science at the University of Toronto, where I was advised by Prof. Florian Shkurti and collaborated with Prof. Fabio Ramos. For my Master’s thesis, I developed a differentiable algorithm for task and motion planning that makes use of gradients from physics simulation. Prior to that, I completed my bachelor’s in Engineering Science at the University of Toronto. During this time, I interned at Epson’s Robotics R&D team researching computer vision algorithms for robotic manipulation.
I am gratefully supported by the NSERC Canada Graduate Scholarship - Doctoral, and have been honored to receive the Google DeepMind Fellowship, NSERC Canada Graduate Scholarship (Master’s), and Ontario Graduate Scholarship for my Master’s studies.
News
- [September 2025] Awarded the NSERC Canada Graduate Scholarship for my PhD
- [March 2025] Our work on differentiable task and motion planning (STAMP) has been accepted to RA-L 2025
- [October 2023] My workshop paper on Differentiable TAMP was accepted to the LEAP Workshop at CoRL 2023
- [July 2023] Selected to attend Robotics: Science and Systems 2023 as an Inclusion Fellow
- [July 2023] Awarded the Ontario Graduate Scholarship
Publications
-
 IEEE Robotics and Automation Letters (RA-L), 2025.Conference on Robot Learning (CoRL), Learning Effective Abstractions for Planning Workshop, 2023.
IEEE Robotics and Automation Letters (RA-L), 2025.Conference on Robot Learning (CoRL), Learning Effective Abstractions for Planning Workshop, 2023.